June 25, 2015 – Universal Instruments’ Polaris “Hybrid” combines the best of Multi-Process and Servo-Gripper into one machine to provide greater flexibility and better support for your custom manufacturing processes.

Same Cell – Several Applications
Key Technologies
- Dispensing
- Pick and Place
- Driving Screws
- Vision Inspection
- Bar Code Scanning
- Labeling
- Clinching
- Packaging
- Laser Marking
- Height Detection
- Press Applications
- Test/Special Application Handling
- Dispense Weight Monitoring

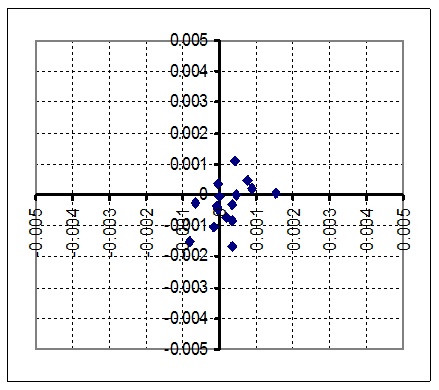
Verified Machine Accuracy
- Every Polaris positioning system is mapped enabling the user to translate CAD files
- The Polaris can be measured using traceable glass boards and components
- Final placement performance for a Servo Gripper or Multi-Process Pick and Place machine is: “X”, “Y” +/- 75 micron @ 4σ; Theta +/- 0.2° @ 4σ; X, Y, & Z repeatability +/- 0.01 mm
Multi-Process Interface
- Standard tool interface allows Polaris to be a platform across multiple work cells (final assembly, odd form, packaging, screw driving, dispensing, etc.)
- Various tools can be used in combinations to achieve custom process requirements
- Modular system and use of standard interfaces results in a cost-effective solution by paying only for needed capability
- Common software interface with all options
Multi-Process Tools/Heads
- Vision guidance camera
- Quadrus 2-D bar code scanner
- Cognex insight color inspection camera
- Keyence color inspection camera
- Vacuum and gripper pick and place tools (pneumatic and servo)
- Dispensing valves
- Screw drivers
- Height detector
- Future applications driven by customer requirements

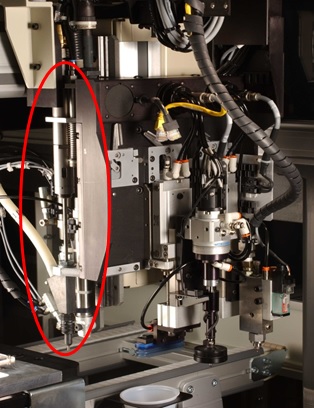
Screw Driving Head
- The head is mounted on the rear of the multi-Process head to conserve a location on the front
- The screw driver that is implemented here is a Deprag, electric drive
- In an effort to conserve space, this driver was re-packaged specifically for Polaris
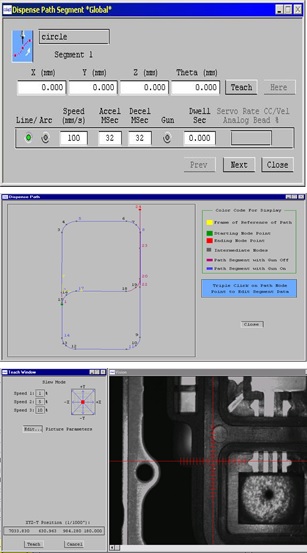
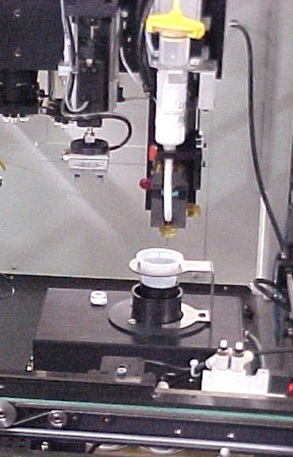
Dispense Path Programming
- Program the machine using the database and the pre-defined shapes
– Speed, acceleration, deceleration, dwell can all be programmed off-line - Look at a dynamic view of the dispense path
– Gross programming errors will be caught before any material is wasted using this view - Check the path on the machine before dispensing any product
– The downward looking camera will drive through the programmed path
Weight Scale – Dispense option
- The scale can be mounted anywhere on the base frame
- Provides the user with the weight of a programmed amount of material
- The scale is primarily used as an audit process during normal production
- The user controls the number of cycles between audits
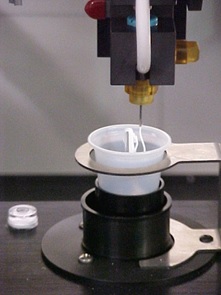
Non-Contact Needle calibration
- This dispensing option provides for automatic calibration at the users request or when changing the needle
- This option eliminates lengthy manual steps to define the new x,y,z coordinates
- If the material has a tendency to to adhere to the bottom or outside of the nozzle, an optional cleaning station is available

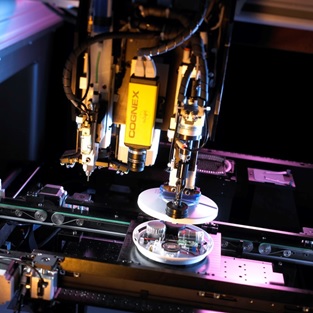
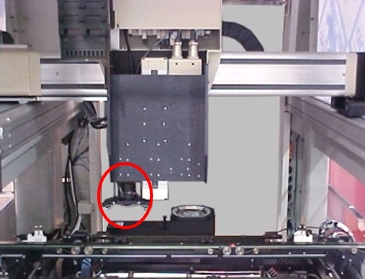
Inside the Machine – Downward Looking Camera
- Allows fiducials or holes to be used for orientation
- Programmable light levels
- Also enables flexible feeder teaching
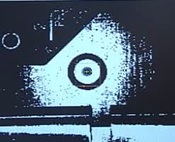
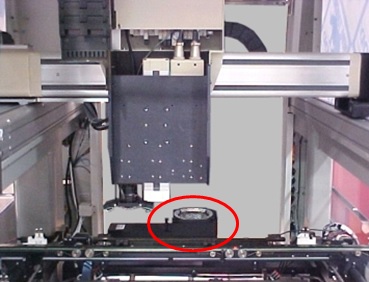
Inside the Machine – Upward Looking Camera
- GSM OFA-style camera
- Software supports pattern recognition for through-hole leads and final assembly components
- Programmable light levels
- Enables CAD-driven placements without adjustment

Material Handling – Triple stage product handling
- Provides for a Board in a stage closer to the “Work” area of the machine
- Edge-belt conveyor accepts up to 457 mm x 508 mm (18” x 20”) boards or pallets
- Optional programmable width control (PWC) and tooling pin registration
- None Required! – The machine is modular and can accept non-Universal product handling or simply a work surface for stand alone applications

Contact Stan Earley by +1-607-725-5129 or earleys@uic.com or go to our website https://www.uic.com/solutions/automation/ for more information on Automation.


